
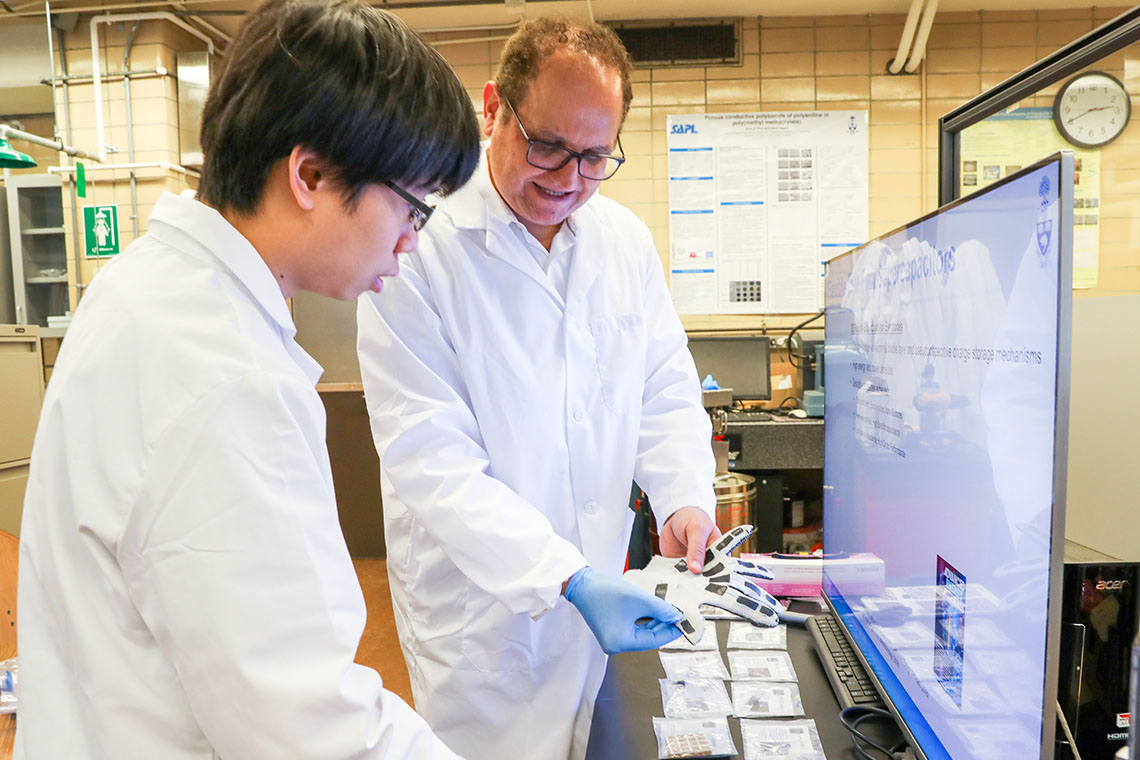
Prof. Hani Naguib (MSE/MIE) has been featured in the UofT News about his innovative work developing “soft” robots and wearable devices with smart materials that physically respond to electrothermal changes in the environment.
Naguib and his group specialize in smart materials. They have created a miniature robot that can crawl with in chworm-like motion. The underlying technology could one day transform industries from aviation to smart wearables.
One line of their research focuses on electrothermal actuators (ETAs), devices made of specialized polymers that can be programmed to physically respond to electrical or thermal changes.
For example, an ETA could be programmed to mimic muscle reflexes, tensing up when cold and relaxing when hot.
Naguib and his team are applying this technology to the robotics field, creating “soft” robots that can crawl and curl. They believe these could one day replace the bulky, metal-plated bots found in manufacturing industries.
“Right now, the robots you’ll find in industry are heavy, solid and caged off from workers on the factory floor because they pose safety hazards,” says Naguib, who is the director of the Toronto Institute of Advanced Manufacturing and the manufacturing robotics lead of U of T’s Robotics Institute.
“But the manufacturing industry is modernizing to meet demand. More and more, there’s an emphasis on incorporating human-robot interactions. Soft, adaptable robots can leverage that collaboration.”
Although responsive materials have been studied for decades, the team has discovered a novel approach to programming them, resulting in the inchworm motion demonstrated in a paper recently published in Scientific Reports.
“Existing research documents the programming of ETAs from a flat resting state. The shape-programmability of a two-dimensional structure is limited, so the response is just a bending motion,” explains Yu-Chen (Gary) Sun, a PhD candidate and the paper’s lead author.
Read full article by writer Liz Do for the UofT News.